| 最深度,最前瞻,一文讲透激光雷达 | 您所在的位置:网站首页 › 激光雷达 fmcw › 最深度,最前瞻,一文讲透激光雷达 |
最深度,最前瞻,一文讲透激光雷达
|
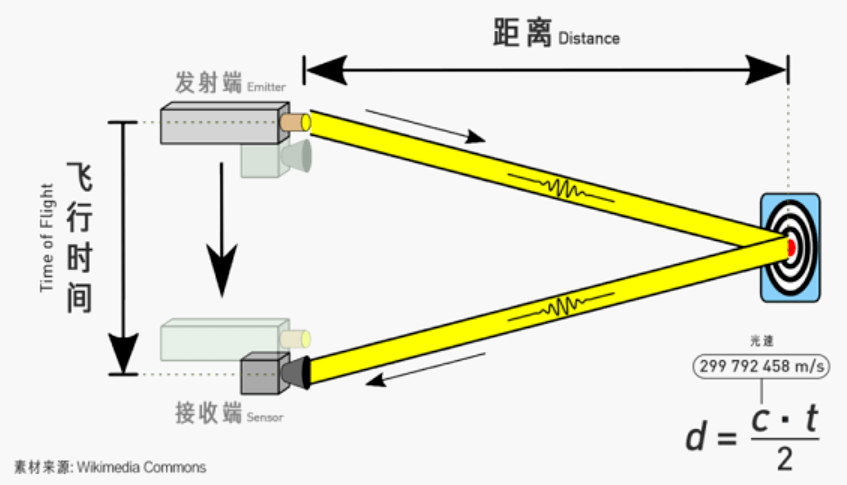
— 观点·洞察 — 百年汽车产业正经历前所未有的最深刻的变革,融汇了新能源、新一代信息通信、云计算、大数据、人工智能等多种变革性技术,汽车早已跳出传统交通工具定义,成为大型移动智能终端、储能单元、数字空间。作为技术集大成者的载体,新能源智能汽车已成为科技界、产业界、资本界的必争之地。 作为产业变革的重要参与者,汽车产业投资机构如何看待新趋势、新机遇、新挑战?以怎样的标准筛选“高壁垒”、“卡脖子”技术,从而助推中国新能源智能汽车在全球范围内形成先发优势? 我们将通过 「观点·洞察」栏目不定期分享北汽产投对资本市场,及各产业细分领域的研究洞察,与各位产业同行者一同预见汽车产业下一站之繁荣。 近期,北汽产投策划召开了 「北汽产投研究研讨会」,召集集团及兄弟企业各条线技术专家、工程师等与产投投研团队进行线上研讨交流,从投资、研发等不同角度进行交流碰撞,以居家为契机,加速充电、蓄力待发。本期内容既为研会第二期激光雷达产业研究概要,本周我们还将围绕动力电池、汽车后市场两大主题开展研讨,欢迎集团及兄弟企业专家、同仁一同交流、研讨。 分 割 线 如果说芯片是智能汽车的大脑,那么以激光雷达为代表的传感器就相当于智能汽车的眼睛,在自动驾驶特别是高级别自动驾驶中发挥着相当重要的作用。作为一项技术密集型的复杂传感器硬件集成技术,激光雷达的性能优势弥补了目前主要汽车传感器的性能短板,但是高昂的成本也限制了它在早期自动驾驶领域的大规模应用。近年来,以速腾聚创、禾赛科技为代表的国产激光雷达的崛起和技术升级迭代,使车载激光雷达的成本进入下降通道,2022年也成为激光雷达批量上车的元年,本期我们将激光雷达拆解为各个模块进行技术、行业、历史、发展角度的研究,力争将激光雷达的技术现状、未来趋势剖析明辨。 1.激光雷达技术原理及结构 1.激光雷达技术原理 光具有波粒二象性,TOF雷达利用了光的粒子性,FMCW利用了光波的特性。举例TOF(Time of Flight)激光雷达原理:雷达主控芯片利用发射光和接收光的时间差,计算目标到雷达的距离,通过1秒钟100万个点云数据,构建目标的3D模型。
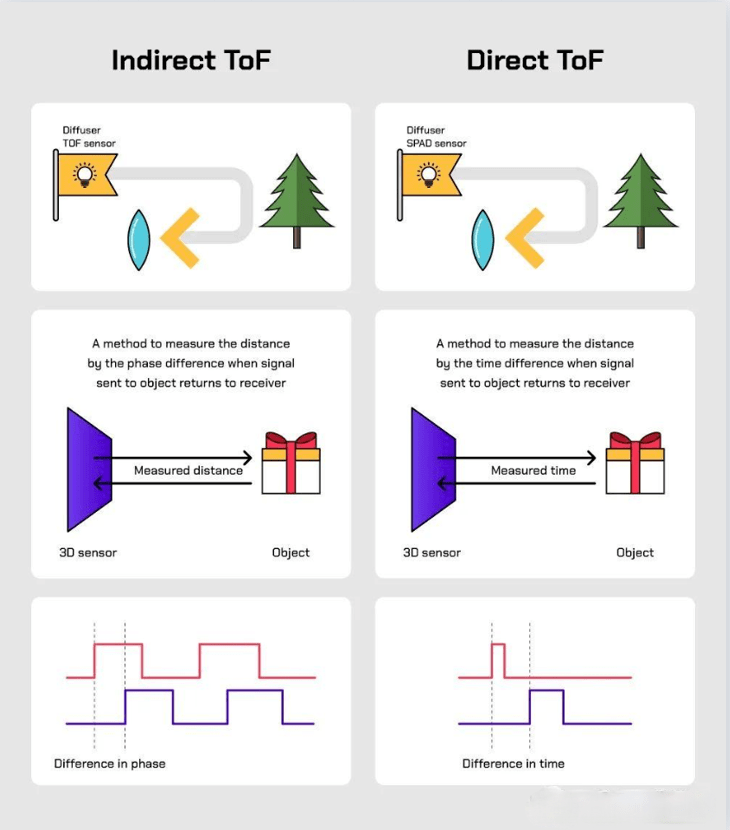
1.1测距方法分为TOF(飞行时间法)和FMCW(调频连续波) 如上所述,激光雷达按测距方法主要分为TOF(飞行时间法)和FMCW(相干检测): 相位和频率的关系:相位的积分是频率,所以iTOF雷达要用FFT做一次傅里叶积分,导致时间灵敏度下降,不适合测试高速物体。优点是成本低。 (2)FMCW为连续调频激光,出射激光一半光留在本地谐振腔,与另一半出射光回光做干涉,通过比较两个光之间的频率/相位差计算距离和速度。
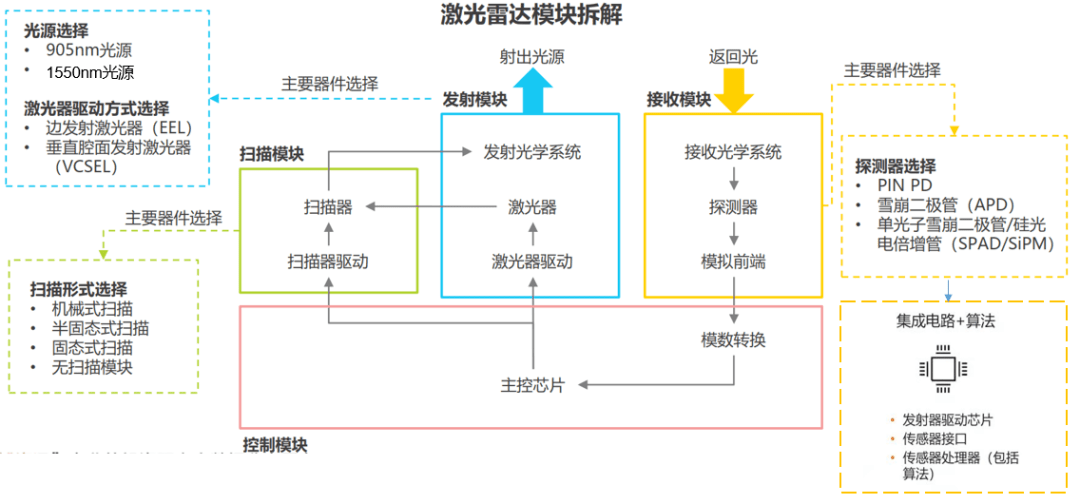
图片来源:电子产品世界 1.2激光雷达典型结构 光学雷达的典型结构分为四部分:光源,扫描器件(光学器件),探测器/接收器,数据处理(电路+算法)。 固态与非固态在激光雷达区别在扫描器件:转镜,棱镜为非固态(机械扫描);半固态,MEMS(直径2-10mm振镜),振膜(Cepton方案);OPA,FLASH为全固态扫描。
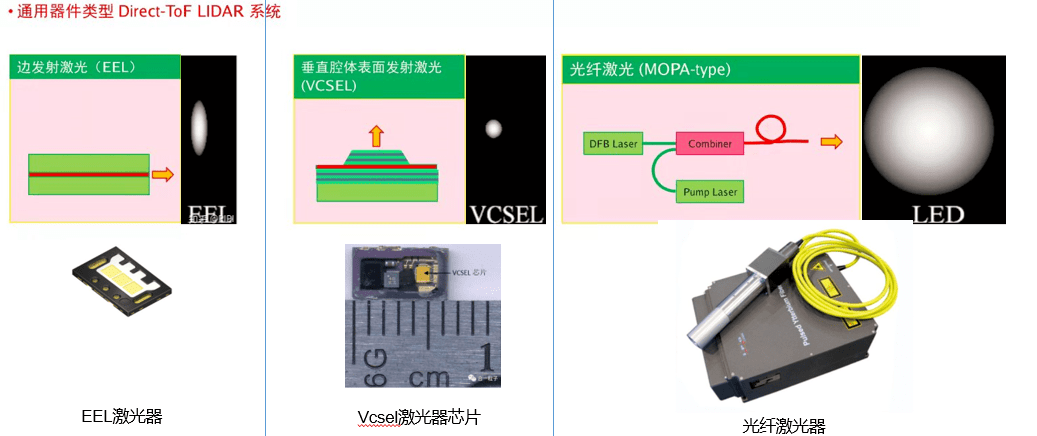
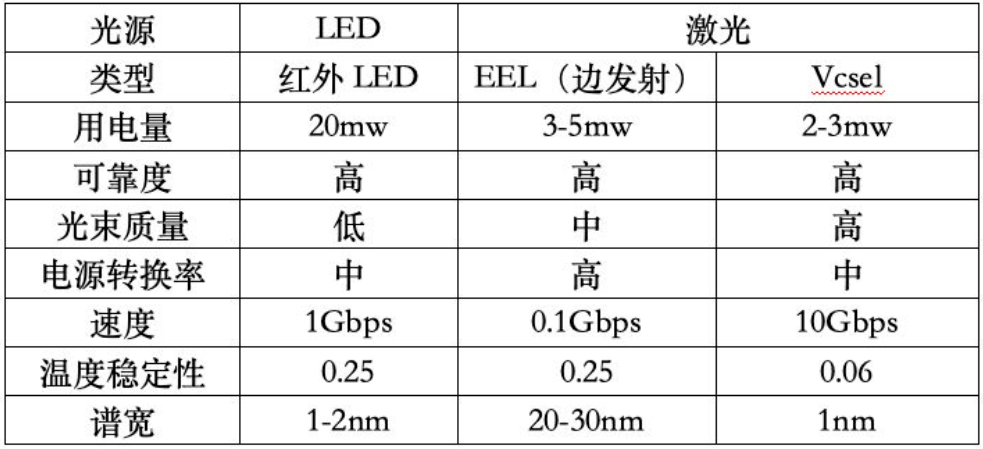
图片来源:北汽产投整理 2.TOF雷达方案选择及应用 2.1光源:激光器方案选择 目前市面上常见的激光器有三种:EEL边发光激光器,VCSEL垂直发射激光器,光纤激光器。光纤激光器体积较大,采用晶体/非晶态玻璃和激光泵浦源,与激光切割机原理相同。优点是功率高,调制速度快。但与激光雷达体积减小的趋势相违背。EEl和VCSEL都属于半导体激光器,EEL由于功率适中成为激光主雷达的主流。VCSEL出光质量高,调制方便,但功率低,被看好未来在角雷达的应用。
图片来源:北汽产投整理 波长与发光材料物理特性有关:905nm激光器多用砷化镓GaAs作为发光材料,1550nm多用磷化铟InP作为发光材料。 (1)Fiber 980/1480nm(光纤激光器)在光通信中大量应用,高功率Fiber激光器可达到10km的传输距离。Fiber激光器特点为高功率,相对价格低。但Fiber激光器有体积较大,激光束腰直径大,温漂高等缺点。 (2)EEL激光器常用905/1550nm波长,905激光质量略胜于1550,905用的较多也因为探测器/接收器较为成熟。 (3)VCSEL激光器常用905nm/940nm,主要优点为窄带宽,准直光,温漂小。缺点功率密度为EEL的1/60。
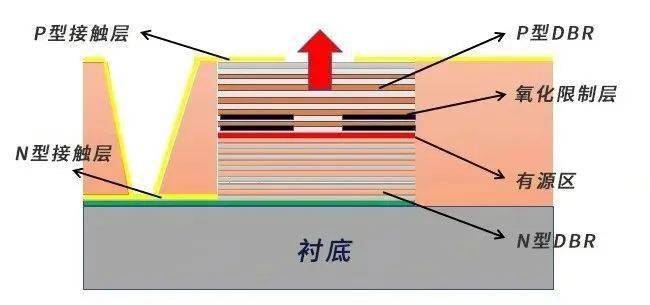
图片来源:北汽产投整理 2.1.1光源:重点说一下VCSEL激光器 VCSEL激光器发展史:VCSEL起源于1979年,最初应用于短距数据通信(光芯片)。经历了两次高速发展,第一次是1990s-2001光通信泡沫期,2008-2009优胜劣汰;第二次是2017年之后iphone前置结构光,后置VR都采用了VCSEL,消费电子带动了VCSEL的第三次投资热潮。 光通信要求激光器调制速度快,功率在3-40mw;激光雷达要求功率在5-40w,对功率密度要求更高。VCSEL的天然温漂小的优势,快速调制能力ppm级别,准直光,光谱窄等优点,被看未来在FLASH雷达中的应用。 图片来源:北汽产投整理 车载VCSEL激光器研发方向。车载激光雷达需要高功率,多PN节的VCSEL产品是解决方案,目前5J VCSEL可以做到1500w/mm2。VCSEL的特点发光区域非常薄,为了让更多的电流转化成光子输出,采用的方式是有源区堆叠厚度,提高PCE。通过驱动小电流上升到非常高的峰值功率。
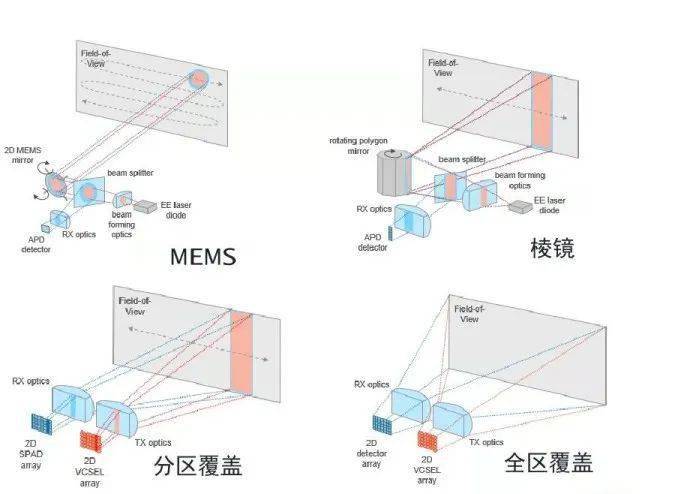
图片来源:互联网图片 VCSEL常用的原材料有砷化镓、磷化铟或氮化镓等发光化合物半导体。VCSEL与其它半导体激光发光原理一样,首先要实现能量激发,通过外加能量激发半导体的电子由价带跃迁到导带,当电子由导带返回价带时,将能量以光能的型式释放出来。然后依靠上下两个DBR反射镜和增益物质组成的谐振腔实现共振放大,谐振腔使激发出来的光在上下两个DBR反射镜之间反射(谐振腔长200nm,来回几千次后,总路径可长达4mm),不停地通过发光区吸收光能,使受激光多次能量反馈而形成激光。 2.2扫描器件:机械扫描方式最稳定 由于激光指向性较强,为了达到面测量结果,需要使激光器或光路进行高频率旋转或振动,来达到机械扫描效果。机械扫描机构有:(1)激光器旋转;(2)棱镜旋转;(3)微机械震动MEMS;(4)Cepton的MMT方案。 扫描方式分为一维扫描、二维扫描,分区覆盖和全区覆盖。EEL由于边缘出光,易制成线阵光源,适用于一维扫描,全区覆盖;VCSEL功率小,易于制成面阵,适用于二维扫描和分区覆盖。
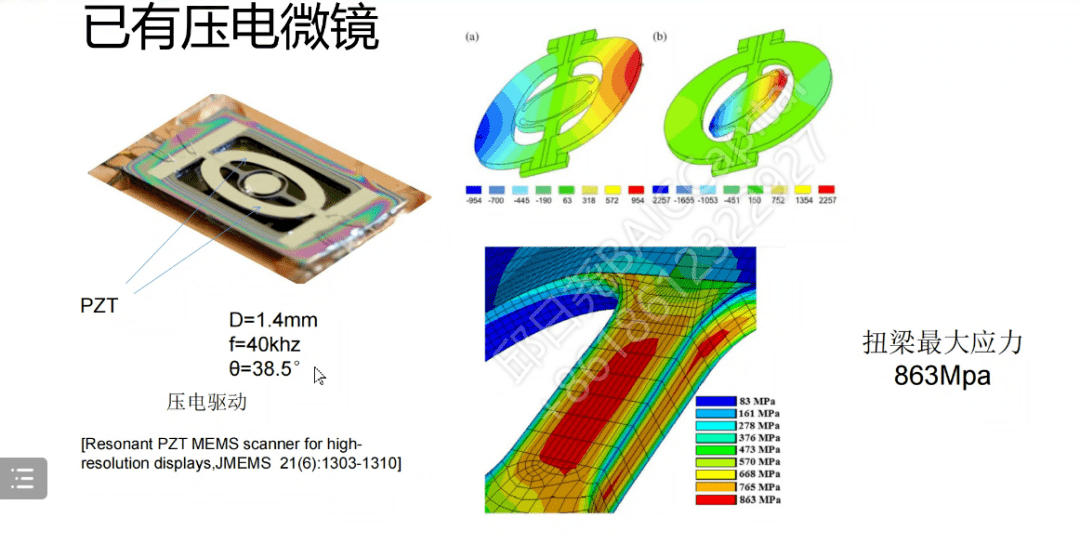
图片来源:ams OSRAM 2.2.1MEMS半固态扫描渗透率在持续增加 MEMS传感器即微机电系统(Microelectro Mechanical Systems)。MEMS激光雷达,通过激光束打在MEMS振镜,以静电或磁驱动MEMS振镜转动,来实现扫描。大振镜10mm直径,市面上也有小振镜1-3mm直径的方案。由于MEMS振镜是Si基材料理论断裂强度为5-6GPa,实际测量中,由于材料缺陷等问题2GPa存在断裂风险。根据下图测试结果,直径1.4mm的振镜,有限元模拟最大应力在863MPa。如果直径在10mm,扭梁应力还要增加,预计比较接近实际断裂强度。MEMS难点也在于小振镜工艺难度高,大振镜应力接近断裂强度,跌落试验过车规较难。
图片来源:北汽产投整理 2.2.2MMT扫描成本优势明显 MMT是多媒体终端(Multi Media Terminal)。激光雷达厂商Cepton采用MMT技术,利用多媒体音响振膜弯曲来实现扫描功能。音响振膜在线圈通电后,达到可使用状态,通过输入音频信号驱动振膜在一个频率实现高频振动。激光打到振膜上,实现高频扫描。 使用MMT进行扫描的有点:1、技术和产业链相对成熟,产品性价比高。预计上车整机在800美元,120米探测距离;2、易于过车规,音响属于成熟产品,在车上大量应用。激光雷达采用同类机械结构,易于过车规;3、批量化生产难度低。
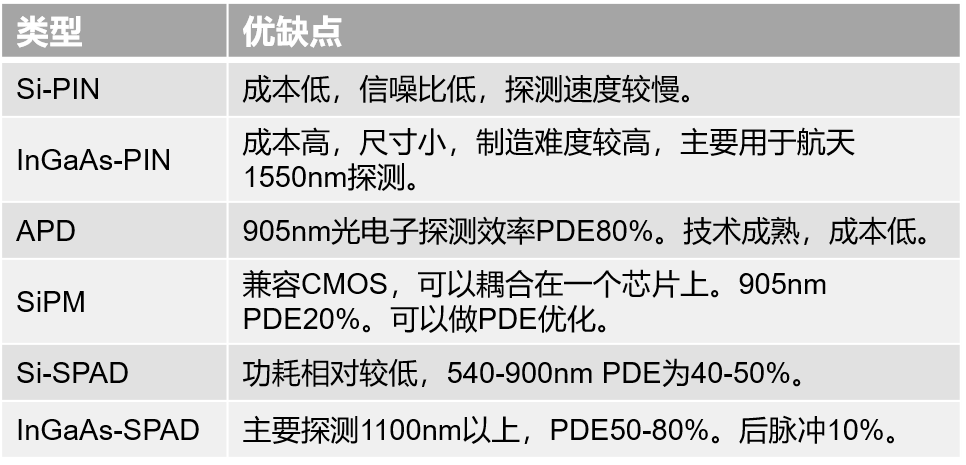
图片来源:Cepton 2.2扫描器件:全固态扫描的三种方法 (1)OPA相控阵,上世纪50-60年代用于军事雷达。用光路做天线阵列难度高,天线直径一个波长,两个天线间距0.5波长,需要大于1000个天线组成阵列。旁瓣串扰,大角度扫描,插损等都是需要解决的难题。 (2)Flash扫描。激光阵列,光强发散,角度固定。缺点为视场角小(FOV),测距近。优点为固态扫描,理想情况可以做到30-50m测距。 (3)波长扫描。使用宽谱波长激光器。色散原件( Dispersion )作用类似棱镜。色散原件可以用芯片实现,1nm波长转0.1度,25度需要至少200nm的波长调节,需要设备级激光器。光通信使用的激光器通常30-40nm波长可调。 2.3探测器-数据处理:单光子雪崩二极管最前沿 探测器需要灵敏度高、速度快、抗干扰,但三种性能往往互相制约。探测材料有Si基CMOS工艺,主要是900nm以下波长探测;也有灵敏度较高的InGaAs探测器,主要用于1550nm波长探测。传统探测器为PIN光电二极管,和APD(雪崩二极管)。新型探测器有 SPAD/SiPM(单光子雪崩二极管),单光子灵敏度极高,早期用在强子对撞机和荧光检测仪。
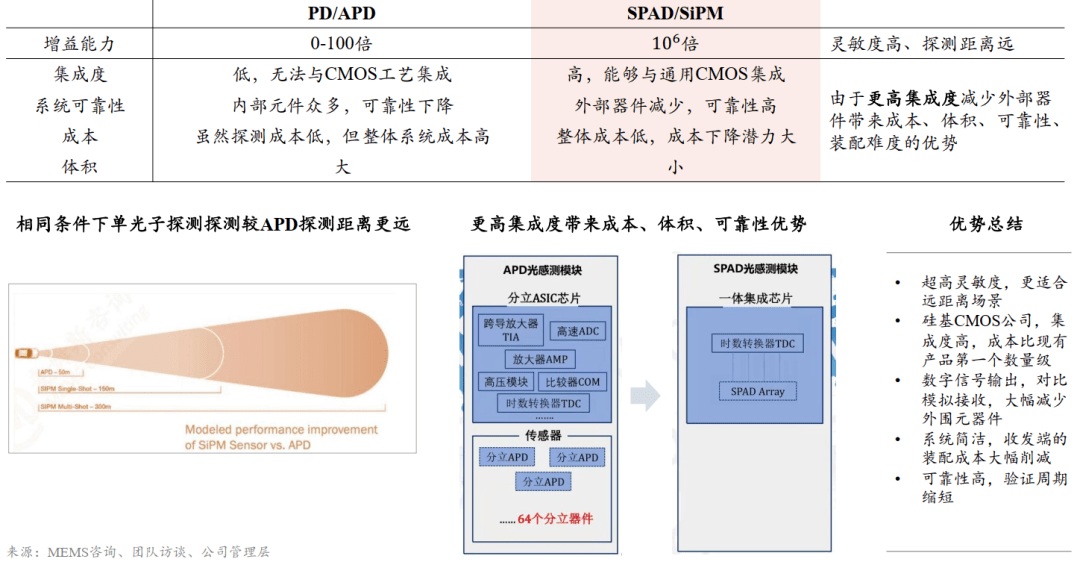
图片来源:北汽产投整理 2.3.1探测器-数据处理:探测器APD与SPAD的区别 目前905nm激光器探测APD(雪崩二极管)是主流方案。一方面由于APD传感器和ASIC读取芯片均采用分立器件,较易实现。同时APD在905nm探测的PDE可优化达到80%。 (1)SPAD(单光子雪崩二级管)与APD(雪崩二极管)相比较的优势,SPAD增益在106,而APD增益在10-100倍。(2)SPAD采用CMOS工艺,集成化程度高。而APD传感器和ASIC读取芯片都是分立器件,集成化程度低。但SPAD由于灵敏度高,抗环境光较弱,PDE后端优化也较难。
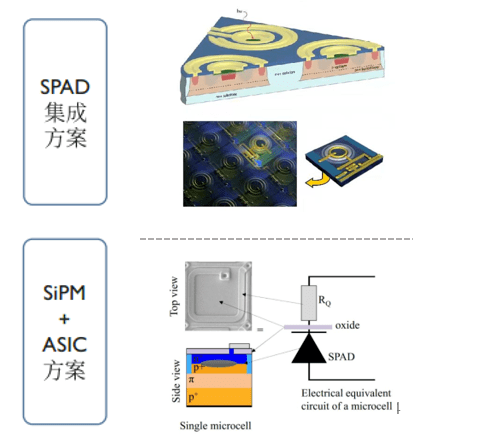
图片来源:北汽产投整理 2.3.2探测器-数据处理:探测器SiPM与SPAD的区别 如果把SiPM比喻成眼睛,那么SPAD就是视觉系统:眼睛+视网膜+数据处理。SiPM在2000年被滨松工业化生产,SPAD是2002年在SiPM基础上发展起来,为了采用CMOS标准工艺提高生产效率,降低成本,但效果并不理想。SPAD与SiPM原理类似,都使用了单光子雪崩二极管,两种器件增益都在106倍,由于对光子增益较大,会产生器件饱和和发热问题,sensor后端还需要接一个淬灭器件进行复位。 要点: (1)SPAD采用有源淬灭,SiPM是无源淬灭。SiPM无源淬灭采用串联金属电阻复位,SPAD有源淬灭复位速度较快。 (2)两种器件主要区别在于SiPM采用定制化工艺,SiPM sensor需要配置专用ASIC芯片读取传感器数据。SiPM可以通过增大有效感光面积,提高PDE效率。 SPAD采用COMS工艺,受限Si器件的物理极限,以及高集成度带来的电路死区面积增加等问题,后端PDE优化较弱。 (3)从信号处理的角度来看,SiPM是将单光子雪崩二极管并联起来,输出一个信号,背景噪声在同一水平下,容易甄别真实的光子进入信号。而SPAD将信号处理后并联起来,所以每个器件都可以收到数据,优点是可以寻址,判别在哪个位置的器件收到的信号,也可以得到每个器件的真实信号。缺点是数据量大,不同器件背景噪声有差异。
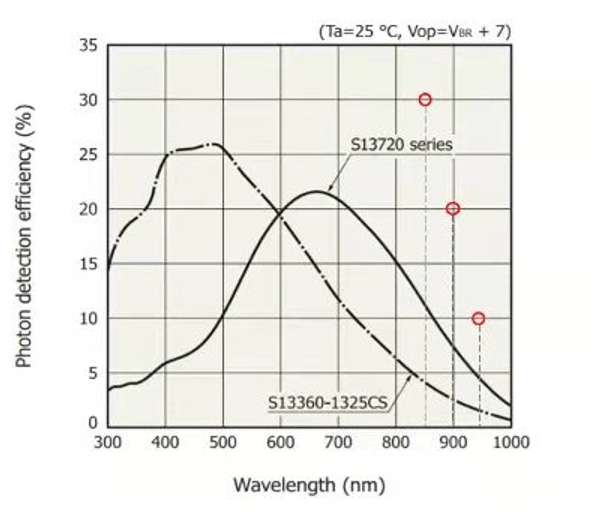
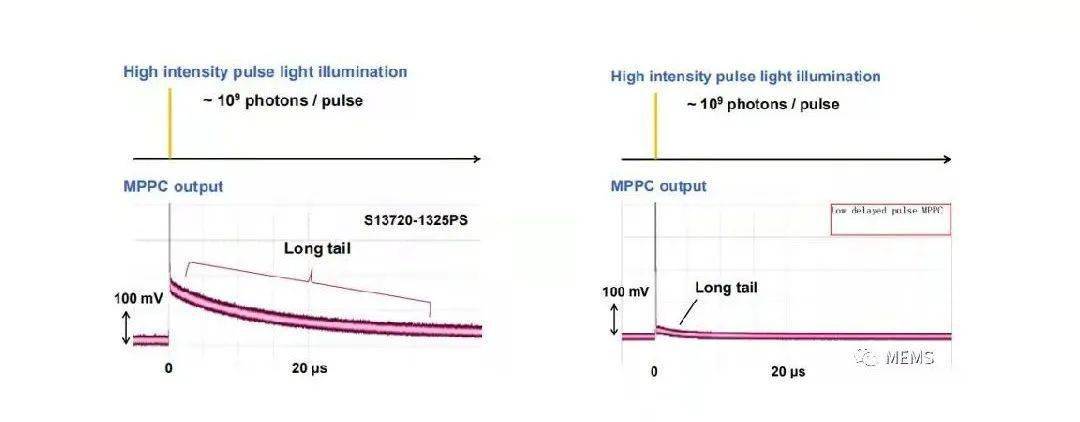
图片来源:北汽产投整理 此外,探测器SiPM需要专门的ASIC读出电路。SPAD需要对光子重复进行多个周期的测量后进行统计。复杂的电路系统,导致时间精度相对SiPM低。SiPM二极管出来的电流信号用TIA放大,跨阻放大器(TIA)是光学传感器(如光电二极管)的前端放大器,用于将传感器的输出电流转换为电压。 SiPM时一定要配合专门的读出芯片,可以是FPGA,也可以是ASIC(流片成本更高,但批量成本低)。根据使用场景不同,ASIC架构可分为电荷敏感,时间敏感,高精度时间和高精度电荷等三种架构。电荷敏感ASIC这对电荷量、像素数目、光的强度进行优化读取。时间敏感针对测飞行时间进行优化读取。ASIC无法保证在电荷敏感和时间敏感两个精度的数据提取都达到最优效果。所以需要针对不同应用做电子学方面的妥协。 探测器SiPM提高PDE(光电转换效率)的几种方法: (1)提高有效探测面积。由于激光雷达窗口有限,在有限的面积上做更多的单光子雪崩二极管,可以提高光的接收效率。 (2)表面镀膜使用纳米涂层将镜头做成单向透射玻璃,光子进入后,在内部可以停留较长时间。而探测器每次脉冲后有较长的dead time回到初始状态,读取在百纳秒内进入的光子,从而提高PDE效率。但这种方法同时也带来光串扰和噪声等问题,需要特殊处理减少负面影响。 SiPM由于sensor较为规整,可以通过提高sensor面积优化探测效率,950nm、900nm、850nm PDE物理极限分别为10%,20%,30%。目前SPAD也尝试升级COMS工艺,从FSI到BSI,从而提高背面sensor面积。
图:滨松S13360到S13720在红外905nmPDE的改进 2.3.3探测器SiPM与SPAD技术难点 SPAD与SiPM的技术难点主要有以下几点: (1)光电子探测效率(Photon Detection Efficiency),由Si,Ge,InGaAs材料物理特性有关。 (2)暗计数(Dark Count):除了光生载流子可以引发雪崩外,由热效应、隧道效应和势阱捕获效应产生暗载流子也可能引发雪崩,这类雪崩信号计数称为暗计数,单位时间内暗计数数率(dark count rate,DCR)。 (3)光学串扰(Crosstalk):光子在一个像素内发生雪崩时,串到其他像素引起的干扰。 (4)后脉冲(After-pulse):在雪崩击穿过程中,大量的载流子在PN结附近形成,这些载流子会有一定的概率被能晶格中的缺陷所俘获,俘获的载流子释放并激发新的雪崩倍增过程,因此产生的脉冲叫后脉冲。 (5)时间精度(Single Photon Timing Resolution):APD里面常用4通道高精度皮秒级TDC价格在几十美元。
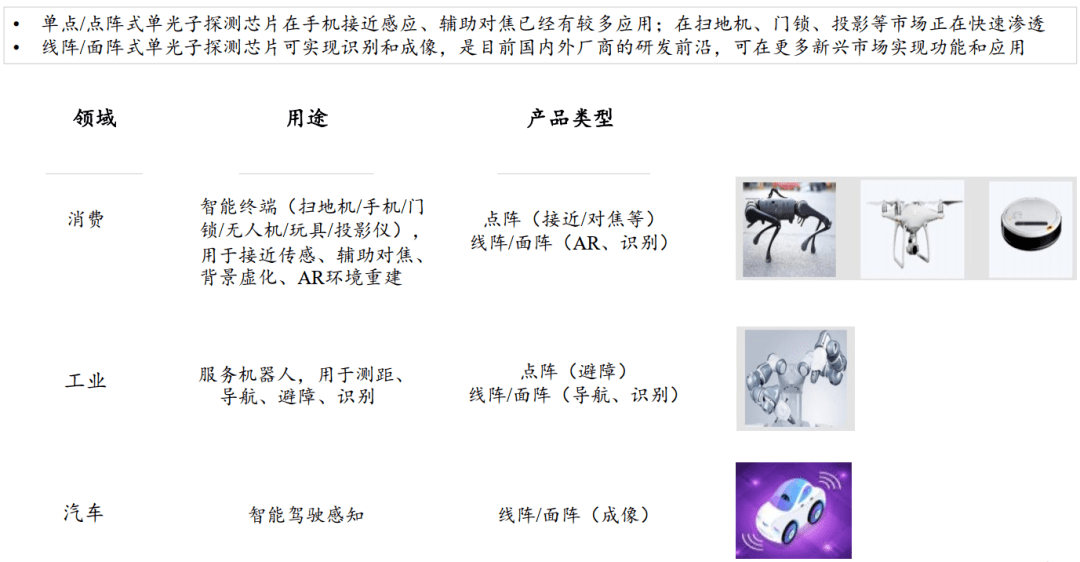
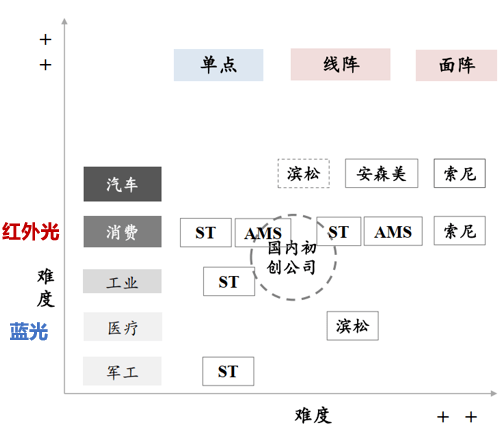
图:后脉冲及其改进方案 2.3.4单线固态激光雷达VCSEL+SPAD用于3-5米测距 意法半导体(ST)的单线VCSEL+SPAD雷达年出货量2亿颗,全球累计销售15亿颗。应用门锁,投影仪,手机,扫地机等。
图片来源:北汽产投整理 2.3.5探测器SiPM与SPAD应用 SiPM最早应用于医疗设备中的CT,荧光标记等,主要是Si材质在蓝光和荧光波段400-500nm的PDE能达到20%以上。而开发消费级和汽车级应用,主要在红外905nm和1550nm波段,Si材质在900nm的PDE只有不到5%。滨松在2020年后通过工艺改造,将这一波段的PDE提到高9%。虽然Sony在2020年给iphone12做了一颗大面阵SPAD,但消费级产品对速度要求不高,Sony通过升级工艺,在2021年推出了车用SPAD面阵。
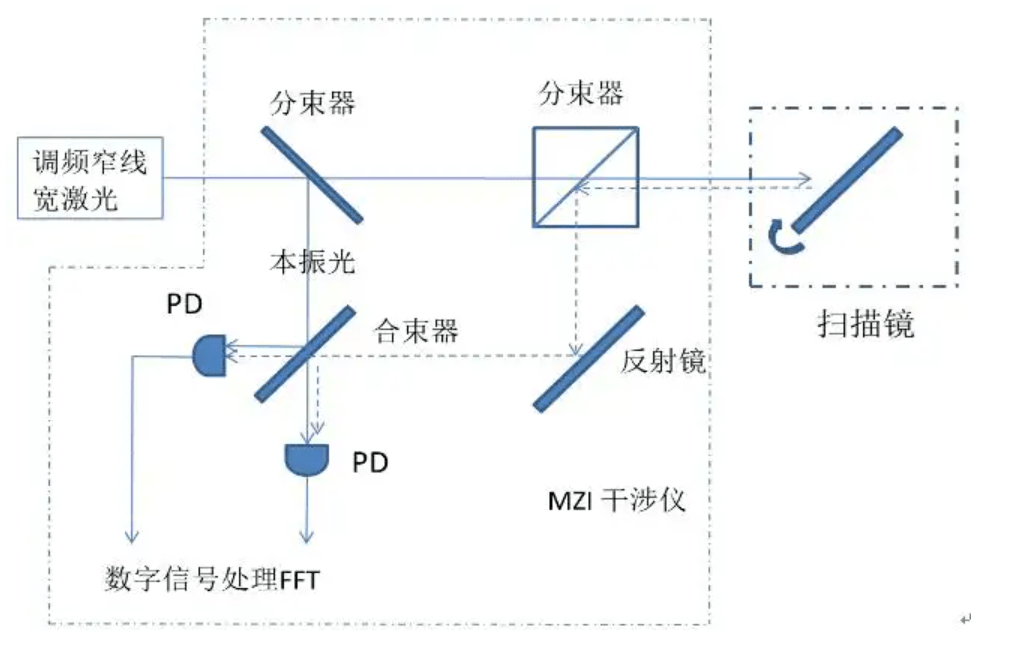
图片来源:北汽产投整理 Sony给ipad pro和iphone12供应了一颗150*140的SPAD面阵芯片;Snoy公开的一款分辨率587*168用于车载激光雷达,据报道测距可以达到300米。Sony、Onsemi、hamamatsu三家可以提供车载激光雷达SPAD/SiPM芯片。 图片来源:北汽产投整理 2.4本部分总结及展望 目前dTOF是主流方案,激光器采用EEL905nm,VCSEL随着技术成熟占比逐渐增加。扫描方式从机械向半固态,纯固态转变。探测器目前以APD为主,未来向SiPM/SPAD转变。 3.FMCW激光雷达技术原理及结构 上文已有阐述,激光雷达从测距原理看主要分TOF和FMCW。上文对TOF典型应用做了较为充分的分析,在此对FMCW进行对比分析。FMCW连续调频波激光雷达区别于TOF的脉冲方式, FMCW的一个重要特性是相干检测原理,激光通过分光器,有一半的光留在本地,放大10万倍,与回光进行干涉。这种检测优点是,有一半的本地光做基准,放大的是真实信号(而非干扰信号),会快速检测到真实的回光,抗干扰能力大大提高。同时与本地光进行对比,可以在像素级别得到速度信息。
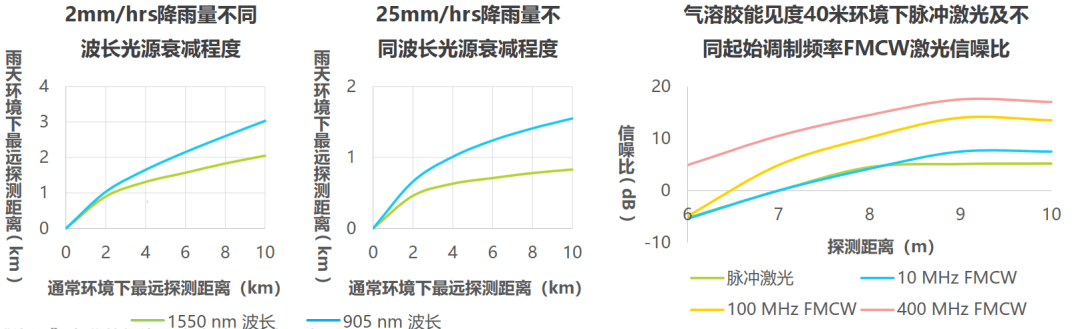
图:本振光放大10万倍可以更高的甄别真实回光 3.1FMCW相较于TOF的优点 FMCW可以实现高集成度。FMCW可以用分立器件实现,也可以把发射和接收端集成为芯片。扫描方式也可采用转镜、棱镜和MEMS等方式扫描。但FMCW技术发展意义在于和OPA相控阵天线结合(难点),可以实现高集成度。同时可实现远距离探测。例Aeva的FMCW雷达,发射和接收芯片只有火柴盒大小,可探测500-600米距离。 因为FMCW常用1550nm光源,所以探测器以InGaAs的PIN光电探测器为主,由光电二极管、滤波器、放大器、驱动器、编解码器等组成。理论上FMCW可以把激光器、发射芯片、光路、镜头、接收芯片、处理芯片集成在一颗芯片上。目前在激光器集成方面,英特尔走的世界前列。 FMCW连续调频波雷达其他优点: (1)利用多普勒效应可以直接计算得出目标的速度信息; (2)窄线宽使得互相干扰概率极低:1550nm的窄线宽激光器为例,线宽频率100MHz,则换算为0.0008nm线宽。 (3)窄线宽可以通过增大功率,使带宽光强高于太阳光3倍以上,太阳直射免疫。 FMCW连续调频波雷达除了可以实现高集成度,探测距离远等优点。1550nm雨雪雾衰减比905nm要小,FMCW比ToF信噪比衰减小。
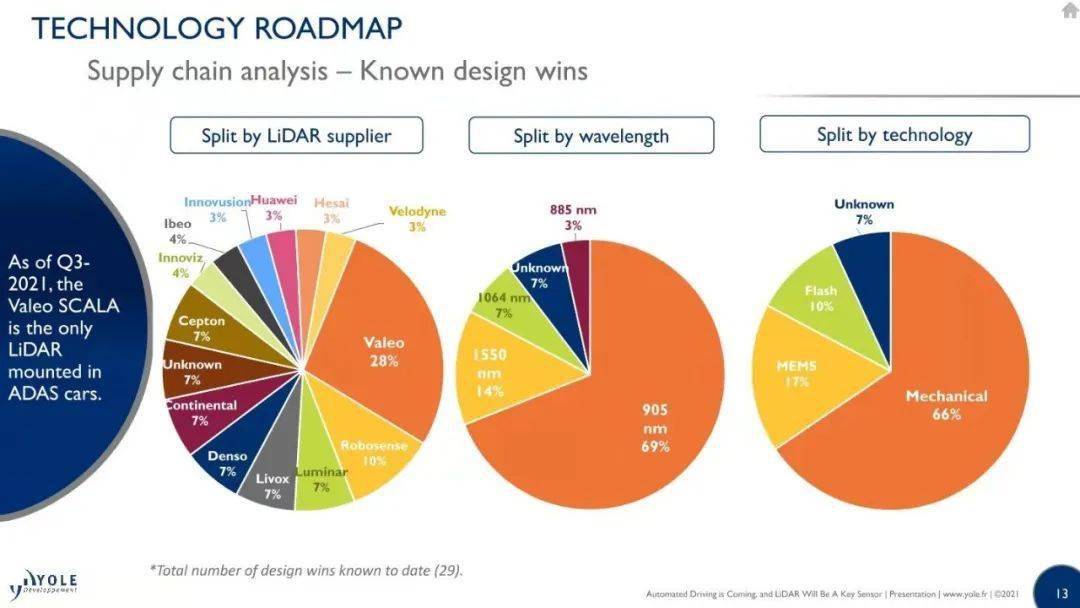
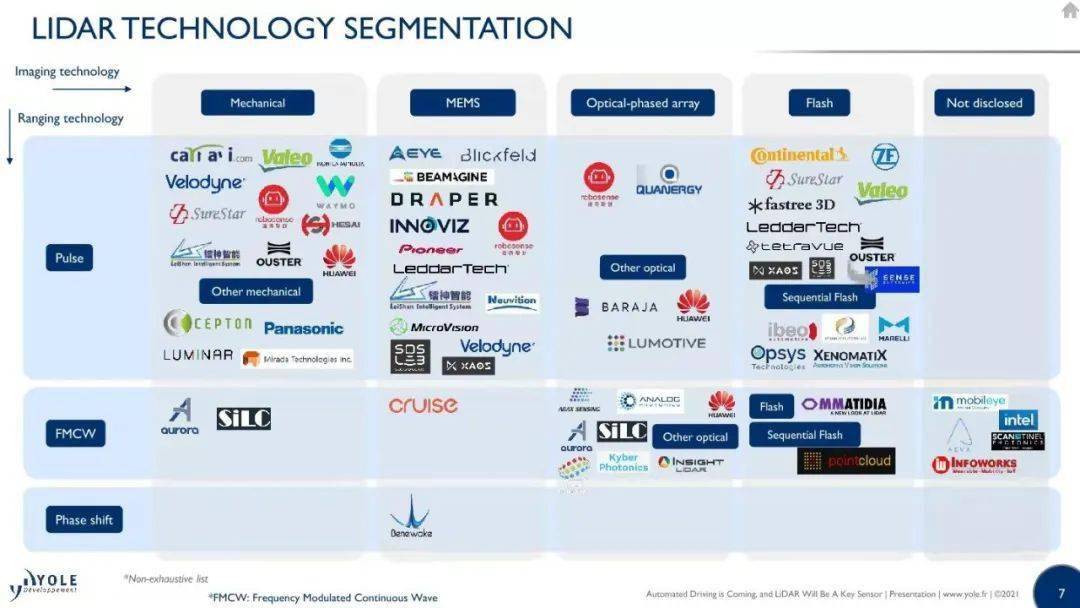
图片来源:艾瑞咨询 3.2FMCW激光雷达核心问题 (1)窄线宽激光器,调制线性调频波,难度非常高。干涉对光的要求苛刻; (2)采用多通道并行处理,数据量大,高速ADC转换的难度提高。加上本地光做干涉,数据处理难度再提高; (3)天线数量多,制造难度高; (4)大量天线带来的旁瓣干扰问题; (5)对大气环境做模拟,对光吸收、折射、反射等做测算。 3.3FMCW激光雷达展望 我们预计FMCW+OPA产品成熟或在2025年之后,2023年之后会有大量样机上市。虽然FMCW激光雷达的研发和制造难度非常高,但是我们仍然看好FMCW+OPA的作为激光雷达的终极解决方案。 4.激光雷达发展趋势 4.1在怀疑中成长:激光雷达在汽车市场发展趋势 激光雷达作为汽车中最贵的传感器,目前普遍成本在1万元人民币以上,目前MEMS和MMT雷达可以做到大幅降低成本,但距离平民价格还有较大距离。特斯拉作为全球新能源汽车龙头,对车载激光雷达的谨慎态度,也让行业对激光雷达的应用保持一份清醒。 我们统计了中国汽车价格在30万以上的车型每年销量接近100万辆,价格在20-30万车型每年销量在320万辆左右。销售金额接近全市场的一半。假设按30万上车型配备激光雷达3颗,1颗正向雷达和2颗角雷达;20-30万车型配备1颗正向雷达。100%渗透率的市场规模310亿,我们预计2025年20万以上车型渗透率达到20%,市场规模接近62亿元。 援引以上公开信息,如上下图所示,目前激光雷达出货排名为Valeo 28%,Robosense 10%(速腾聚创),Luminar 7%,Livox 7%,Denso 7%,Continental 7%,Cepton 7%。905nm将长期占据主流方案,1550nm市场份额将逐步增加。机械式将逐步降低市场份额,半固态和固态份额将逐步提升。
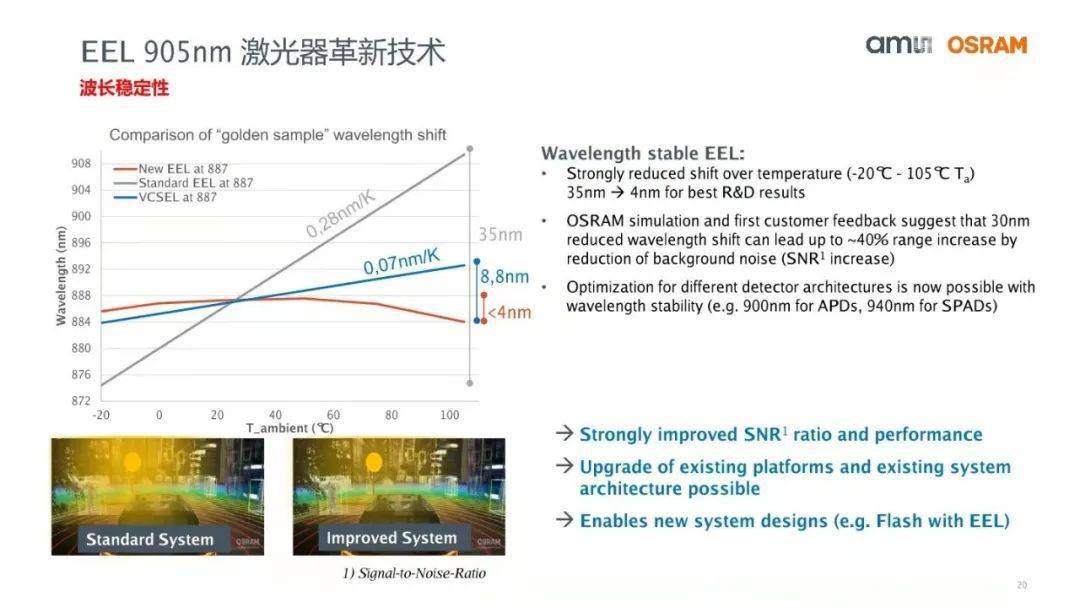
4.2不可逆转的芯片化、固态化进程 从激光器、扫描器件、探测器、数据处理四个结构来看,激光器未来发展趋势是芯片化,目前EEL/VCSEL激光器与CMOS工艺不兼容,英特尔致力于将激光器耦合在硅片上,难度最高。固态化主要指扫描器件,激光雷达厂商自发向固态扫描升级。高灵敏探测器SiPM/SPAD应用将使集成度提高,接收芯片或与发射芯片集成在一颗芯片上。 4.3激光器:EEL中短期优势仍在 EEL长期占据主流。VCSEL逐步成熟,形成高可靠性和可寻址两个方向。FMCW激光器仍在发展中。 VCSEL激光器温漂在0.07nm/K,而EEL激光器温漂在0.28nm/K。受温度环境影响,VCSEL激光器线宽更低,精度更高。但ams OSRAM利用特有工艺技术,收窄了EEL激光器的温漂曲线。
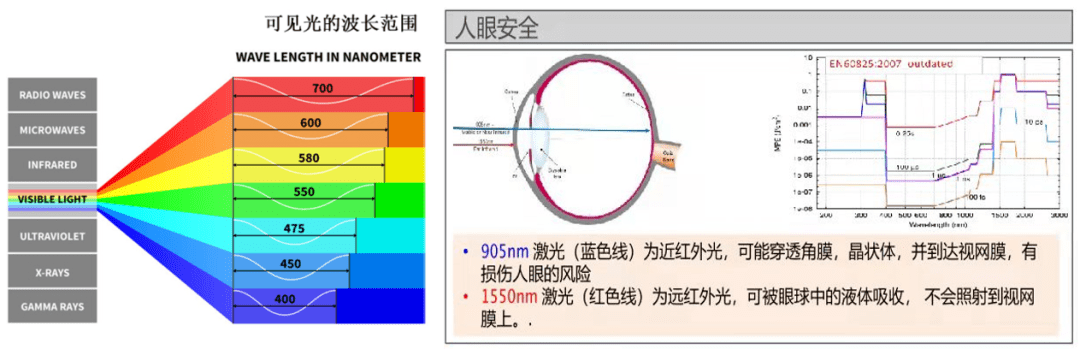
激光器可寻址也是未来发展趋势,目前1D寻址已经开始,未来将做到2D寻址。可以控制激光器阵列,驱动单点或区域发光,实现收发固态扫描。VCSEL如果面阵足够大,功率足够高,是可以做为良好的FLASH扫描方式的光源。同时控制分区发光,可以实现30-50米方向可控的发射和接收。 4.4新型探测器SIPM/SPAD逐步成熟 SPAD集成度高,大量应用于医学和药物检测,荧光检测等。2016年Toyota将SPAD首次应用于汽车。Sony将SPAD面阵应用于Iphone12和IPAD pro,之后又用于车载激光雷达。ST发明接近传感器,全球出货量15亿颗,消费电子将应用普及化。2020年Sony提出3D堆叠方案。SPAD 3D堆叠工艺复杂、技术难度非常高。国产厂商仍在追赶国际巨头的脚步。 4.5从安全性看,激光对人眼的危害 905nm激光近红外,接近可见光360nm-750nm频率,可穿透角膜和晶状体,直接到达视网膜。而1550nm激光为远红外,主要被角膜上的液体吸收。所以大功率905nm激光主要对视网膜产生损伤,而1550nm激光主要损伤角膜。
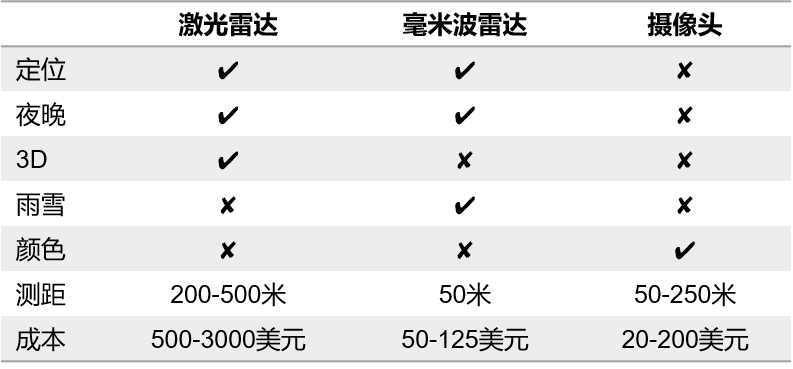
图片来源:ams OSRAM 根据ams OSRAM 的模拟计算,1D 扫描中采用大于3mm直径的反射镜时,1550nm所允许的功率仅为905nm的2倍左右。 我们认为除波长以外,出光的方式TOF和FMCW影响峰值功率和总功率,也影响人眼安全的结果: (1)TOF一次脉冲时长为2纳秒(10-9)。1秒钟如果连续发射,可以脉冲5亿次,但TOF只用了1万次。而FMCW则相当于用了5亿次。理论上的峰值功率FMCW比TOF低了4个数量级。插损等影响,实际峰值功率TOF约为FMCW百倍。 (2)TOF雷达系统总功率通常在40-50w,甚至百瓦以上。FMCW系统功率通常在10-20w。 总结:905nm主要用于TOF,1550nm广泛用于FMCW。1550nm+FMCW人眼安全性预计比905nm+TOF高一到两个数量级。 4.6车企如何应用激光雷达 商用车、乘用车、robotaxi对激光雷达放置的位置、扫描机构、探测距离、视场角以及成本都有不同的需求,所以选择适合自己的激光雷达供应商,比选择性能更加重要。 图片来源:北汽产投整理 激光雷达具有定位功能、夜晚适用、3D建模能力;与摄像头和毫米波雷达相比,最突出的优势在于更远的探测距离。目前机械式和半机械式激光雷达普遍测距范围可以达到100-200米,Sony采用新一代接收传感器SPAD的雷达测距范围可以达到300米,Aeva的FMCW雷达2021年在北美测试达到500米测距。在商用车、自动驾驶等领域,激光雷达目前是最有潜力的远距离车载传感器。
图表来源:北汽产投 对于自动驾驶如何使用激光雷达的数据,下游也没有统一定论。一方面是由于多传感器融合没有统一方法,而不同传感器的数据冗余和数据冲突,也是需要长期解决的问题。另一方面,目前自动驾驶算法采用了摄像头数据作为决策依据,而增加激光雷达以后,算法不能复用也导致激光雷达使用成本提升。所以下游厂商需要什么样的数据,对激光雷达的定义对雷达厂商极为重要。 从目前发展的阶段来看,激光雷达的测距远,毫米波雷达可穿透雨雪雾,摄像头的高像素和灰度信息,三种传感器的优势互补,仍将长期存在。 5.激光雷达投资机会 我们认为未来短距30-60m有可能发展为Flash+SPAD/SiPM,或MEMS+SPAD仍为主流,主要看两种方案性能和价格的竞争优势。100-200m仍以MEMS等半机械为主,逐步过渡到全固态扫描方式。500-1000m则以FMCW+OPA为主流产品。 各主机厂根据成本和性能的需求,选择适合自己的激光雷达方案,预计未来激光雷达投资机会泛化,行业格局以3-5家龙头为主,集中度不断提高。有特色的小规模雷达厂也将长期存在,与个别厂商长期绑定。
本文作者:邱日尧 |

【本文地址】